
How it Works
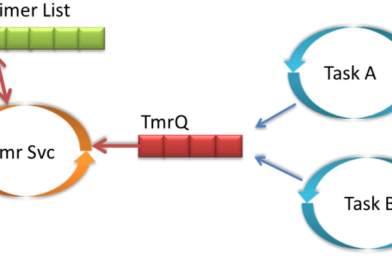
The following diagram gives an overview, how Software Timers in FreeRTOS are implemented:

FreeRTOS Software Timers
There is a dedicated Tmr Svc (Timer Service or Deamon) task that maintains an ordered list of software timers, with the timer to expire next in front of the list). The Timer Service task is not continuously running: from the Timer List, the task knows the time when it has to wake up each time a timer in the timer list has expired. When a timer has expired, the Timer Service task calls its callback (the Timer callback).
The other concept the Timer task is using is a queue: this queue is used for inter-process communication. Using that queue, other tasks can send commands to the timer task, for example, to start or stop a timer. The Timer Task will wake up when something is sent to that queue. And that way, the Timer API has parameters like ‘ticksToWait’ to specify the waiting time if the timer queue is full.
One-Shot and Auto-Reload
FreeRTOS software timers support two different software timer, configured at timer creation time:
- One-Shot: When the timer expires, it is not restarted again. I still can restart it at a later time. Making it ideal for a ‘one-shot’ kind of thing.
- Auto-Reload: This timer will automatically be restarted when it expires, making it ideal for periodic kinds of things.
Timer Task and FreeRTOSConfig.h
To use FreeRTOS timers, you have to turn them on with the following entry in FreeRTOSConfig.h:
#define configUSE_TIMERS 1
If you are not using FreeRTOS software timers, set that macro to 0, otherwise, your application is using more resources than necessary. Because this creates the ‘Tmr Svc’ task during vTaskStartScheduler():

TmrSvc Created
In the above screenshot (Event Object column) you can see as well that the Tmr Svc is waiting for receiving an object in the TmrQ queue.
This timer task is responsible to handle all FreeRTOS software timers in the system. Basically, it checks if a timer has been expired and calls the associated timer hook.
The timer task name, priority and stack size can be configured with the following macros in FreeRTOSConfig.h
#define configTIMER_SERVICE_TASK_NAME "Tmr Svc"
#define configTIMER_TASK_PRIORITY (configMAX_PRIORITIES - 1)
#define configTIMER_TASK_STACK_DEPTH (configMINIMAL_STACK_SIZE * 2)I recommend giving the timer task the highest task priority in the system, otherwise, you will see some latency in the timer hook execution. The timer stack size really depends on what you are doing in the timer hooks called from the timer task. To find out what your tasks are using on the stack, see Understanding FreeRTOS Task Stack Usage and Kernel awareness Information.
Timer Queue and FreeRTOSConfig.h
The other thing that gets created is a queue for the timer task, named ‘TmrQ’:

TmrQ Queue for Timer Task
This queue is used for IPC (Inter-Process Communication) between the timer task and the other tasks of the system. The length of the queue can be configured with the following macro, while the name of the queue “TmrQ” is hard-coded in the RTOS:
#define configTIMER_QUEUE_LENGTH 10
The question might be: What is a useful length for that queue? Because the longer it is, the more RAM is used. Basically, the queue needs to hold as many command items which can be sent by other tasks (or interrupts) until they can be served by the Timer Task. With the Timer task having the highest priority in the system, the queue can be smaller. But if multiple commands can be sent from higher priority tasks or from interrupts, make sure your queue is long enough for this.
Creating a Software Timer
In this example, I’m going to create a software timer that blinks an LED every second. To create a new software timer, I need a timer handle for it:
xTimerHandle timerHndl1Sec;
Below is the API to create a new timer:
TimerHandle_t xTimerCreate( const char * const pcTimerName,
const TickType_t xTimerPeriodInTicks,
const UBaseType_t uxAutoReload,
void * const pvTimerID,
TimerCallbackFunction_t pxCallbackFunction )To create a new timer, I use:
timerHndl1Sec = xTimerCreate(
"timer1Sec", /* name */
pdMS_TO_TICKS(1000), /* period/time */
pdTRUE, /* auto reload */
(void*)0, /* timer ID */
vTimerCallback1SecExpired); /* callback */
if (timerHndl1Sec==NULL) {
for(;;); /* failure! */
}The first parameter is a string for the timer name, followed by the timer (initial) period in RTOS timer ticks. The next parameter with ‘pdTRUE’ requests an ‘auto-reload’ timer, which means the timer is a periodic one, and not a one-shot timer. Next, I can provide a timer ID (pointer to void) and finally the most important thing: the timer callback. The callback is the function which will get called when the timer expires.
Naturally, the shortest period time you can reach with a FreeRTOS software timer is a single tick period. So if your FreeRTOS is running with a 1 kHz tick period, you only can implement a 1 kHz software timer that way. If it needs to be faster, you have to consider using a hardware timer.
The xTimerCreate() only creates the timer, but does not start it. This will be the next topic.
Because a timer creation can fail (e.g. running out of memory), it is good practice to check the returned timer handle.
Timer Callback
During xTimerCreate(), I had to specify a callback (function pointer). I want to toggle an LED, so my callback looks like this:
static void vTimerCallback1SecExpired(xTimerHandle pxTimer) {
GPIO_PortToggle(BOARD_INITPINS_LED_RED_GPIO, 1<<BOARD_INITPINS_LED_RED_PIN); /* toggle red LED */
}As the timer callbacks are called from the Timer Service task, it is important that the callback function does not block (e.g. waits for some time or waits for a semaphore), as otherwise, all other timers get delayed. So the general rule for a timer callback function (as for interrupt service routines) is to keep it short and simple!
Starting a Timer
A timer previously created with xTimerCreate() gets started with:
BaseType_t xTimerStart( TimerHandle_t xTimer, TickType_t xTicksToWait );Here, the ‘ticksToWait’ indicates the queue API and specifies how long the caller shall wait if the timer queue is already full.
I create a timer with:
if (xTimerStart(timerHndl1Sec, 0)!=pdPASS) {
for(;;); /* failure!?! */
}The above code will fail if the timer queue will not be large enough. This will start the timer with the given period (at creation time). If the timer is started before the scheduler is started, the timer will start to run at scheduler start time. If the timer is started say from a task, it starts at the current tick time at which xTimerStart() is called.
Below is a live plot of the 1-second software timer in MCUXpresso IDE (Eclipse-based):

Plot of 1 Sec Timer
Resetting a Timer
With…
BaseType_t xTimerReset( TimerHandle_t xTimer, TickType_t xTicksToWait );… a timer can be reset. And if that timer has not already been started, it will start the timer. I’m going to use that for my next example. For a display, I want to keep the backlight on for 5 seconds, and when the user presses a button, that 5 seconds shall start again. So that timer acts as a timeout timer: If it does not get reset by a button, it will expire after 5 seconds.
Again, I create a software timer. But this time, I do not start it:
xTimerHandle timerHndl5SecTimeout;
timerHndl5SecTimeout = xTimerCreate(
"timerGreen", /* name */
pdMS_TO_TICKS(5000), /* period/time */
pdFALSE, /* auto reload */
(void*)1, /* timer ID */
vTimerCallback5SecExpired); /* callback */
if (timerHndl5SecTimeout==NULL) {
for(;;); /* failure! */
}The callback looks like this:
static void vTimerCallback5SecExpired(xTimerHandle pxTimer) {
/* this timer callback turns off the green LED */
GPIO_PortSet(BOARD_INITPINS_LCD_BACKGROUND_LIGHT, 1<<BOARD_INITPINS_LCD_BACKGROUND_LIGHT_PIN); /* turn off LCD Light */
}Inside a task, I’m checking the user buttons (e.g. for menu navigation). Here I turn on the LCD backlight and start the timeout timer:
if (!GPIO_PinRead(BOARD_INITPINS_SW3_GPIO, BOARD_INITPINS_SW3_PIN)) { /* pin LOW ==> SW03 push button pressed */
GPIO_PortClear(BOARD_INITPINS_LCD_BACKGROUND_LIGHT, 1<<BOARD_INITPINS_LCD_BACKGROUND_LIGHT_PIN); /* Turn green LED on */
if (xTimerReset(timerHndl5SecTimeout, 0)!=pdPASS) { /* start timer to turn off LCD after 5 seconds */
for(;;); /* failure?!? */
}
}So when the user presses a button, it will restart the timer, and if it expires, it will turn off the LCD backlight. Below a plot with the two timers in action:

LCD Backlight with FreeRTOS Software Timers
Other Timer Functions
The FreeRTOS Software Timer API provides more:
- Changing timer period
- Deleting a timer
- Get and Set the Timer ID
- Get timer name, period and expiry time
- Get the timer task handle

FreeRTOS Software Timer Functions
Timer functions can be called from an interrupt service routine if they have the FromISR in the name.
A rather special one is xTimerPendFunctionCall(): With that API method, I can send to the timer deamon task a callback/function pointer to be called. Basically a ‘dear timer task, please execute this function for me.’ This function will be called immediately (and only once) when the timer deamon tasks remove the command from the timer queue.
Summary
Software timers are very useful: I can implement multiple periodic or one-shot/timeout timers with a single timer (deamon) task. That way, I don’t need extra hardware timers and I need fewer resources than using a task for each periodic action.
examles
xTimerHandle timer;
void onTimeup(xTimerHandle handle){
Serial.println((char*)pvTimerGetTimerID(handle));//my timer
Serial.println(xTimerGetExpiryTime(handle)-xTaskGetTickCount());// 10000 if auto reload parameter in create equal pdtrue or 0 if pdfalse
}
void setup(){
Serial.begin(9600);
timer=xTimerCreate("timer1",10000,pdTRUE,(void*)"my timer",onTimeup);//pdtrue for autoreload id my timer
xTimerStart(timer,0);//start timer with 0 wait
}
