Norton’s Theorem states that it is possible to simplify any linear circuit, no matter how complex, to an equivalent circuit with just a single current source and parallel resistance connected to a load. Just as with Thevenin’s Theorem, the qualification of “linear” is identical to that found in the Superposition Theorem: all underlying equations must be linear (no exponents or roots).
Simplifying Linear Circuits
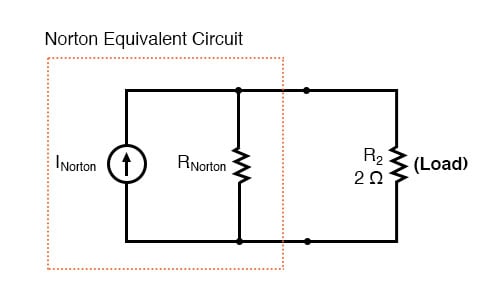
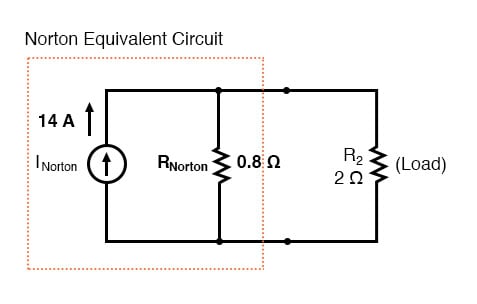
Contrasting our original example circuit against the Norton equivalent: it looks something like this:
. . . after Norton conversion . . .
Remember that a current source is a component whose job is to provide a constant amount of current, outputting as much or as little voltage necessary to maintain that constant current.
Thevenin’s Theorem vs. Norton’s Theorem
As with Thevenin’s Theorem, everything in the original circuit except the load resistance has been reduced to an equivalent circuit that is simpler to analyze. Also similar to Thevenin’s Theorem are the steps used in Norton’s Theorem to calculate the Norton source current (INorton) and Norton resistance (RNorton).
Identify The Load Resistance
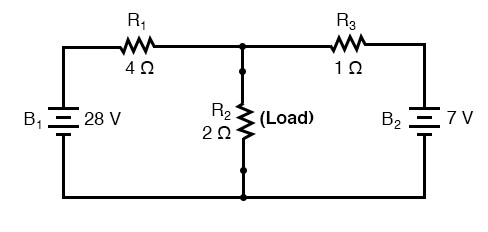
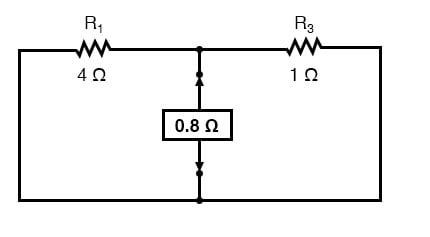
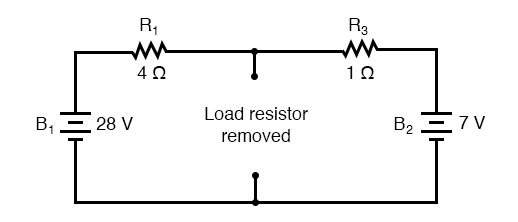
As before, the first step is to identify the load resistance and remove it from the original circuit:
Find The Norton Current
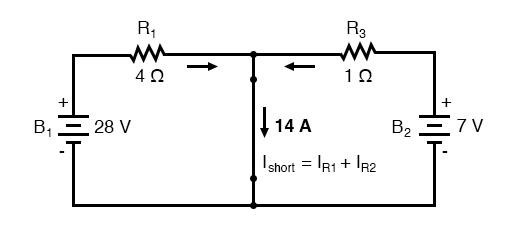
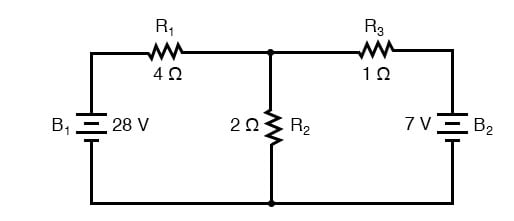
Then, to find the Norton current (for the current source in the Norton equivalent circuit), place a direct wire (short) connection between the load points and determine the resultant current. Note that this step is exactly opposite the respective step in Thevenin’s Theorem, where we replaced the load resistor with a break (open circuit):
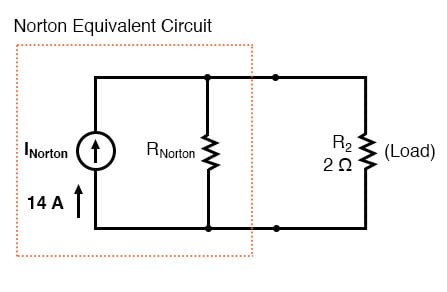
With zero voltage dropped between the load resistor connection points, the current through R1 is strictly a function of B1‘s voltage and R1‘s resistance: 7 amps (I=E/R). Likewise, the current through R3 is now strictly a function of B2‘s voltage and R3‘s resistance: 7 amps (I=E/R). The total current through the short between the load connection points is the sum of these two currents: 7 amps + 7 amps = 14 amps. This figure of 14 amps becomes the Norton source current (INorton) in our equivalent circuit:
Find Norton Resistance
Remember, the arrow notation for current source points in the direction of conventional current flow. To calculate the Norton resistance (RNorton), we do the exact same thing as we did for calculating Thevenin resistance (RThevenin): take the original circuit (with the load resistor still removed), remove the power sources (in the same style as we did with the Superposition Theorem: voltage sources replaced with wires and current sources replaced with breaks), and figure total resistance from one load connection point to the other:
Now our Norton equivalent circuit looks like this:
Determine The Voltage Across The Load Resistor
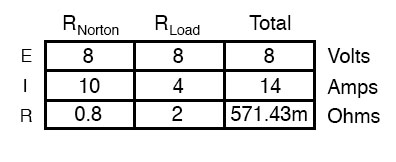
If we re-connect our original load resistance of 2 Ω, we can analyze the Norton circuit as a simple parallel arrangement:
As with the Thevenin equivalent circuit, the only useful information from this analysis is the voltage and current values for R2; the rest of the information is irrelevant to the original circuit. However, the same advantages seen with Thevenin’s Theorem apply to Norton’s as well: if we wish to analyze load resistor voltage and current over several different values of load resistance, we can use the Norton equivalent circuit, again and again, applying nothing more complex than simple parallel circuit analysis to determine what’s happening with each trial load.
proof
REVIEW:
Norton’s Theorem is a way to reduce a network to an equivalent circuit composed of a single current source, parallel resistance, and parallel load.
Steps to follow for Norton’s Theorem:
Find the Norton source current by removing the load resistor from the original circuit and calculating the current through a short (wire) jumping across the open connection points where the load resistor used to be.
Find the Norton resistance by removing all power sources in the original circuit (voltage sources shorted and current sources open) and calculating total resistance between the open connection points.
Draw the Norton equivalent circuit, with the Norton current source in parallel with the Norton resistance. The load resistor re-attaches between the two open points of the equivalent circuit.
Analyze voltage and current for the load resistor following the rules for parallel circuits.
Superposition theorem is one of those strokes of genius that takes a complex subject and simplifies it in a way that makes perfect sense. A theorem like Millman’s certainly works well, but it is not quite obvious why it works so well. Superposition, on the other hand, is obvious.
Series/Parallel Analysis
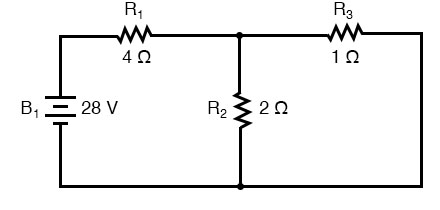
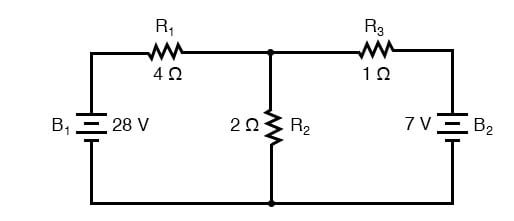
The strategy used in the Superposition Theorem is to eliminate all but one source of power within a network at a time, using series/parallel analysis to determine voltage drops (and/or currents) within the modified network for each power source separately. Then, once voltage drops and/or currents have been determined for each power source working separately, the values are all “superimposed” on top of each other (added algebraically) to find the actual voltage drops/currents with all sources active. Let’s look at our example circuit again and apply Superposition Theorem to it:
Since we have two sources of power in this circuit, we will have to calculate two sets of values for voltage drops and/or currents, one for the circuit with only the 28-volt battery in effect. . .
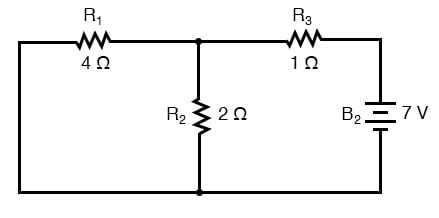
. . . and one for the circuit with only the 7-volt battery in effect:
When re-drawing the circuit for series/parallel analysis with one source, all other voltage sources are replaced by wires (shorts), and all current sources with open circuits (breaks). Since we only have voltage sources (batteries) in our example circuit, we will replace every inactive source during analysis with a wire.
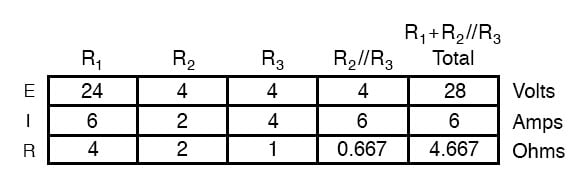
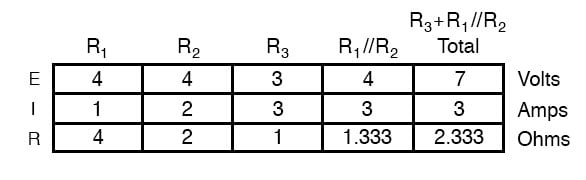
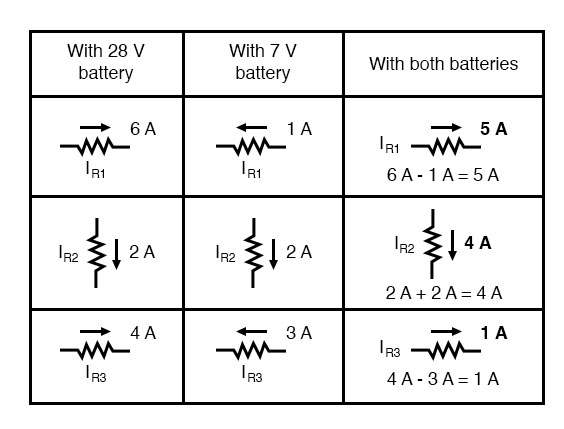
Analyzing the circuit with only the 28-volt battery, we obtain the following values for voltage and current:
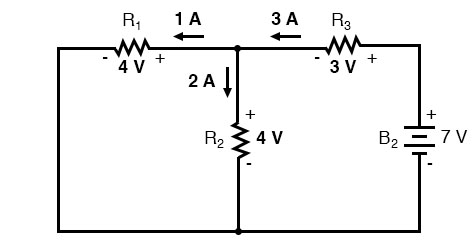
Analyzing the circuit with only the 7-volt battery, we obtain another set of values for voltage and current:
By Superimposing
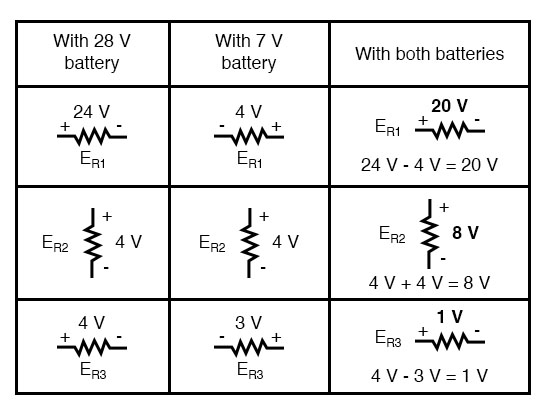
When superimposing these values of voltage and current, we have to be very careful to consider polarity (of the voltage drop) and direction (of the current flow), as the values have to be added algebraically.
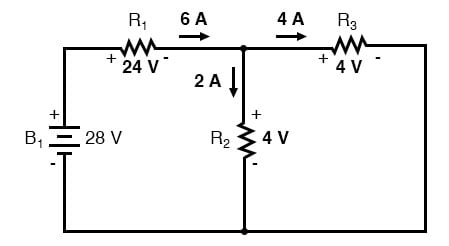
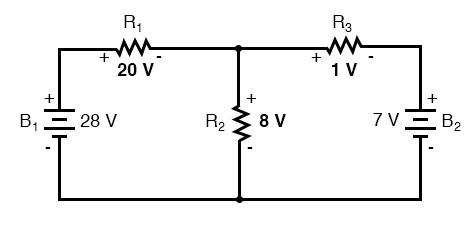
Applying these superimposed voltage figures to the circuit, the end result looks something like this:
Currents add up algebraically as well and can either be superimposed as done with the resistor voltage drops or simply calculated from the final voltage drops and respective resistances (I=E/R). Either way, the answers will be the same. Here I will show the superposition method applied to current:
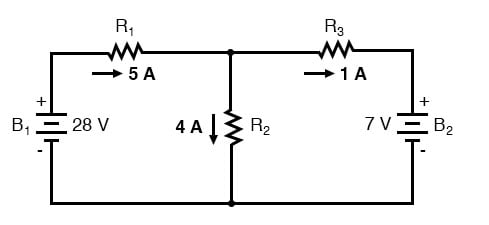
Once again applying these superimposed figures to our circuit:
Prerequisites for the Superposition Theorem
Quite simple and elegant, don’t you think? It must be noted, though, that the Superposition Theorem works only for circuits that are reducible to series/parallel combinations for each of the power sources at a time (thus, this theorem is useless for analyzing an unbalanced bridge circuit), and it only works where the underlying equations are linear (no mathematical powers or roots). The requisite of linearity means that Superposition Theorem is only applicable for determining voltage and current, not power!!! Power dissipations, being nonlinear functions, do not algebraically add to an accurate total when only one source is considered at a time. The need for linearity also means this Theorem cannot be applied in circuits where the resistance of a component changes with voltage or current. Hence, networks containing components like lamps (incandescent or gas-discharge) or varistors could not be analyzed.
Another prerequisite for Superposition Theorem is that all components must be “bilateral,” meaning that they behave the same with electrons flowing in either direction through them. Resistors have no polarity-specific behavior, and so the circuits we’ve been studying so far all meet this criterion.
The Superposition Theorem finds use in the study of alternating current (AC) circuits, and semiconductor (amplifier) circuits, where sometimes AC is often mixed (superimposed) with DC. Because AC voltage and current equations (Ohm’s Law) are linear just like DC, we can use Superposition to analyze the circuit with just the DC power source, then just the AC power source, combining the results to tell what will happen with both AC and DC sources in effect. For now, though, Superposition will suffice as a break from having to do simultaneous equations to analyze a circuit.
REVIEW:
The Superposition Theorem states that a circuit can be analyzed with only one source of power at a time, the corresponding component voltages and currents algebraically added to find out what they’ll do with all power sources in effect.
To negate all but one power source for analysis, replace any source of voltage (batteries) with a wire; replace any current source with an open (break).
The Mesh-Current Method, also known as the Loop Current Method, is quite similar to the Branch Current method in that it uses simultaneous equations, Kirchhoff’s Voltage Law, and Ohm’s Law to determine unknown currents in a network. It differs from the Branch Current method in that it does not use Kirchhoff’s Current Law, and it is usually able to solve a circuit with less unknown variables and less simultaneous equations, which is especially nice if you’re forced to solve without a calculator.
Mesh Current, conventional method
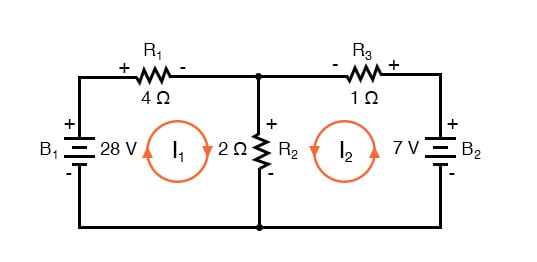
Let’s see how this method works on the same example problem:
Identify Loops
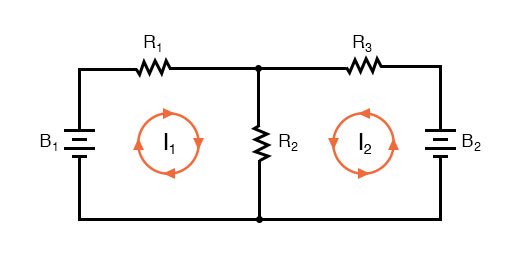
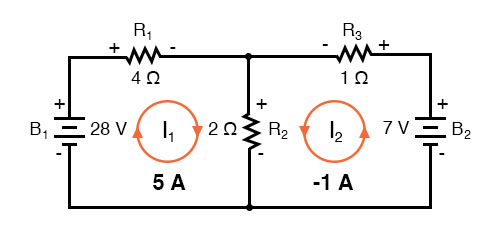
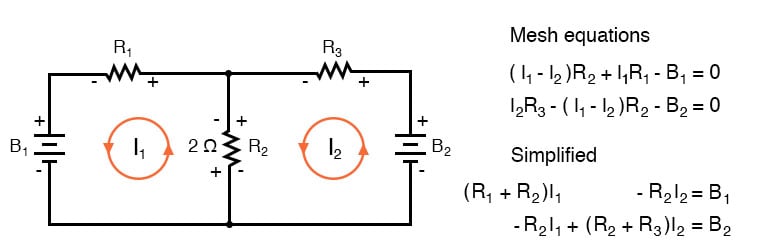
The first step in the Mesh Current method is to identify “loops” within the circuit encompassing all components. In our example circuit, the loop formed by B1, R1, and R2 will be the first while the loop formed by B2, R2, and R3 will be the second. The strangest part of the Mesh Current method is envisioning circulating currents in each of the loops. In fact, this method gets its name from the idea of these currents meshing together between loops like sets of spinning gears:
The choice of each current’s direction is entirely arbitrary, just as in the Branch Current method, but the resulting equations are easier to solve if the currents are going the same direction through intersecting components (note how currents I1 and I2 are both going “up” through resistor R2, where they “mesh,” or intersect). If the assumed direction of a mesh current is wrong, the answer for that current will have a negative value.
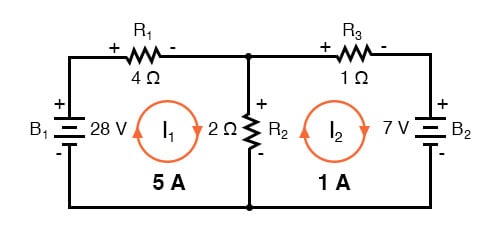
Label the Voltage Drop Polarities
The next step is to label all voltage drop polarities across resistors according to the assumed directions of the mesh currents. Remember that the “upstream” end of a resistor will always be negative, and the “downstream” end of a resistor positive with respect to each other, since electrons are negatively charged. The battery polarities, of course, are dictated by their symbol orientations in the diagram, and may or may not “agree” with the resistor polarities (assumed current directions):
Using Kirchhoff’s Voltage Law, we can now step around each of these loops, generating equations representative of the component voltage drops and polarities. As with the Branch Current method, we will denote a resistor’s voltage drop as the product of the resistance (in ohms) and its respective mesh current (that quantity being unknown at this point). Where two currents mesh together, we will write that term in the equation with resistor current being the sum of the two meshing currents.
Tracing the Left Loop of the Circuit with Equations
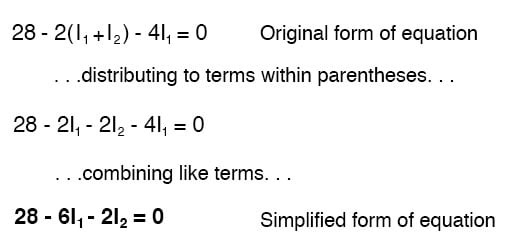
Tracing the left loop of the circuit, starting from the upper-left corner and moving counter-clockwise (the choice of starting points and directions is ultimately irrelevant), counting polarity as if we had a voltmeter in hand, red lead on the point ahead and black lead on the point behind, we get this equation:
Notice that the middle term of the equation uses the sum of mesh currents I1 and I2 as the current through resistor R2. This is because mesh currents I1 and I2 are going the same direction through R2, and thus complement each other. Distributing the coefficient of 2 to the I1 and I2 terms, and then combining I1 terms in the equation, we can simplify as such:
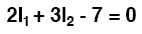
At this time we have one equation with two unknowns. To be able to solve for two unknown mesh currents, we must have two equations. If we trace the other loop of the circuit, we can obtain another KVL equation and have enough data to solve for the two currents. Creature of habit that I am, I’ll start at the upper-left-hand corner of the right loop and trace counter-clockwise:
Simplifying the equation as before, we end up with:
Solving For The Unknown
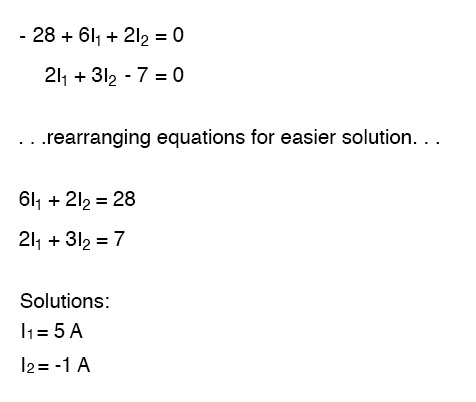
Now, with two equations, we can use one of several methods to mathematically solve for the unknown currents I1 and I2:
Redraw Circuit
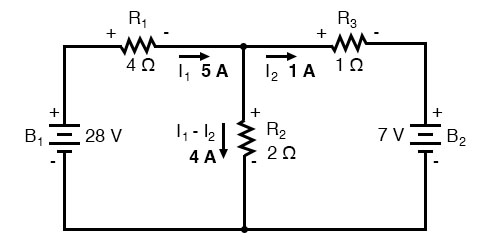
Knowing that these solutions are values for mesh currents, not branch currents, we must go back to our diagram to see how they fit together to give currents through all components:
The solution of -1 amp for I2 means that we initially assumed the direction of current was incorrect. In actuality, I2 is flowing in a counter-clockwise direction at a value of (positive) 1 amp:
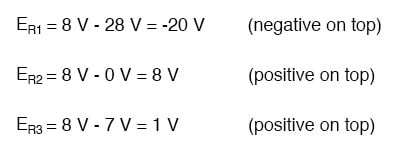
This change of current direction from what was first assumed will alter the polarity of the voltage drops across R2 and R3 due to current I2. From here, we can say that the current through R1 is 5 amps, with the voltage drop across R1 being the product of current and resistance (E=IR), 20 volts (positive on the left and negative on the right).
Also, we can safely say that the current through R3 is 1 amp, with a voltage drop of 1 volt (E=IR), positive on the left and negative on the right. But what is happening at R2?
Mesh current I1 is going “down” through R2, while mesh current I2 is going “up” through R2. To determine the actual current through R2, we must see how mesh currents I1 and I2 interact (in this case they’re in opposition), and algebraically add them to arrive at a final value. Since I1 is going “down” at 5 amps, and I2 is going “up” at 1 amp, the real current through R2 must be a value of 4 amps, going “down”:
A current of 4 amps through R2‘s resistance of 2 Ω gives us a voltage drop of 8 volts (E=IR), positive on the top and negative on the bottom.
Advantage of Mesh Current Analysis
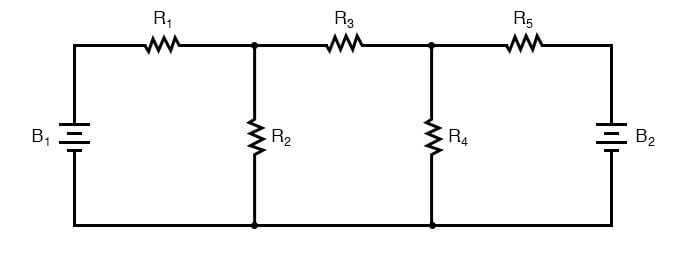
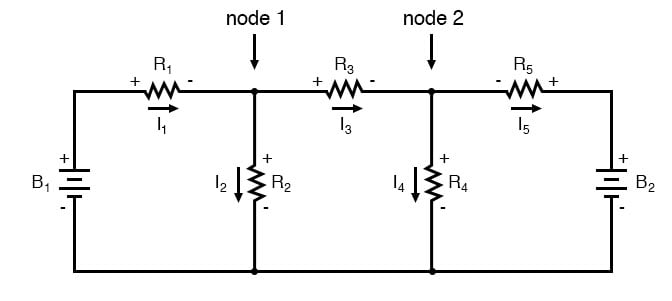
The primary advantage of Mesh Current analysis is that it generally allows for the solution of a large network with fewer unknown values and fewer simultaneous equations. Our example problem took three equations to solve the Branch Current method and only two equations using the Mesh Current method. This advantage is much greater as networks increase in complexity:
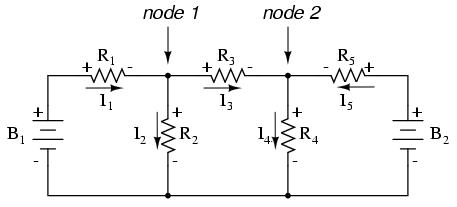
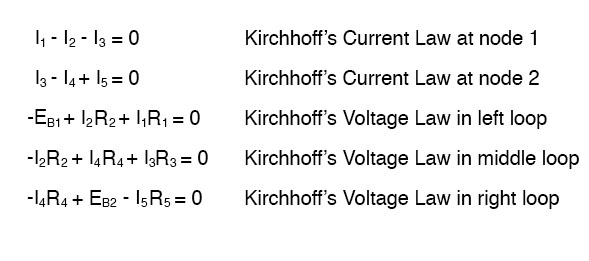
To solve this network using Branch Currents, we’d have to establish five variables to account for each and every unique current in the circuit (I1 through I5). This would require five equations for the solution, in the form of two KCL equations and three KVL equations (two equations for KCL at the nodes, and three equations for KVL in each loop):
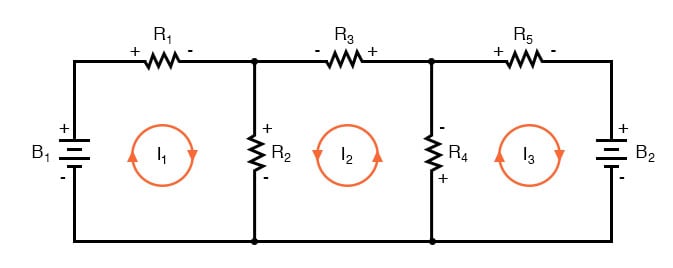
I suppose if you have nothing better to do with your time than to solve for five unknown variables with five equations, you might not mind using the Branch Current method of analysis for this circuit. For those of us who have better things to do with our time, the Mesh Current method is a whole lot easier, requiring only three unknowns and three equations to solve:
Less equations to work with is a decided advantage, especially when performing a simultaneous equation solution by hand (without a calculator).
Unbalanced Wheatstone Bridge
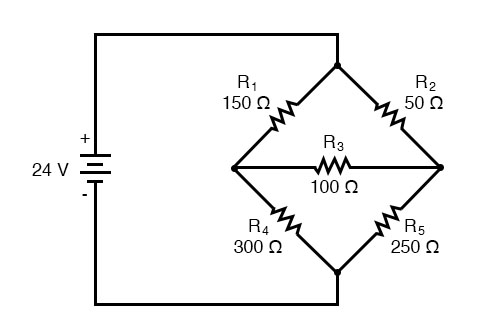
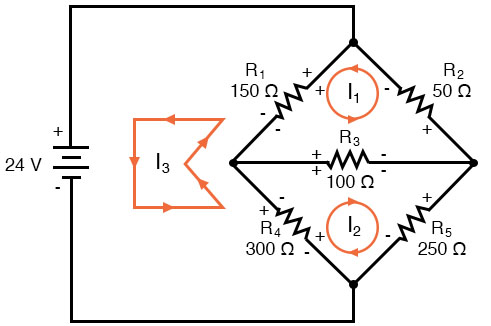
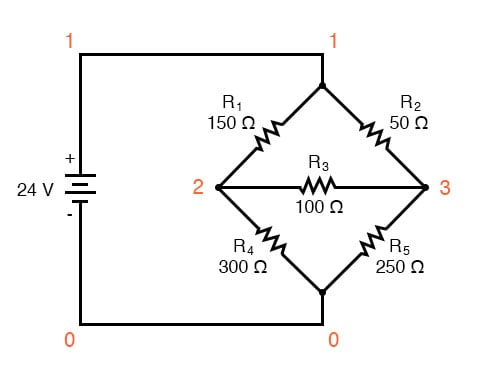
Another type of circuit that lends itself well to Mesh Current is the unbalanced Wheatstone Bridge. Take this circuit, for example:
Since the ratios of R1/R4 and R2/R5 are unequal, we know that there will be the voltage across resistor R3, and some amount of current through it. As discussed at the beginning of this chapter, this type of circuit is irreducible by normal series-parallel analysis, and may only be analyzed by some other method.
We could apply the Branch Current method to this circuit, but it would require six currents (I1 through I6), leading to a very large set of simultaneous equations to solve. Using the Mesh Current method, though, we may solve for all currents and voltages with much fewer variables.
Draw Mesh
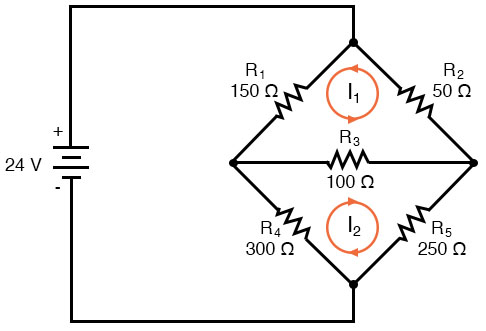
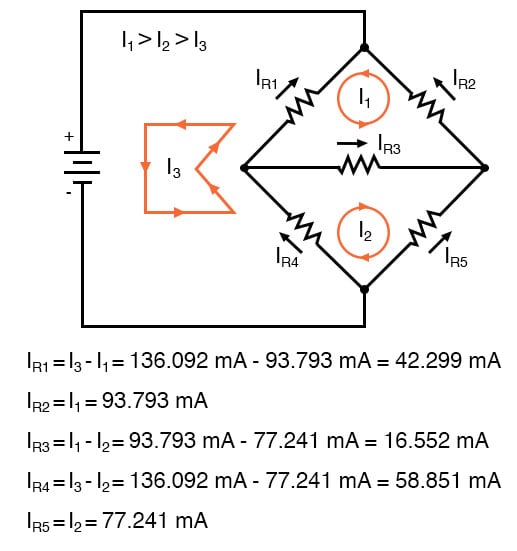
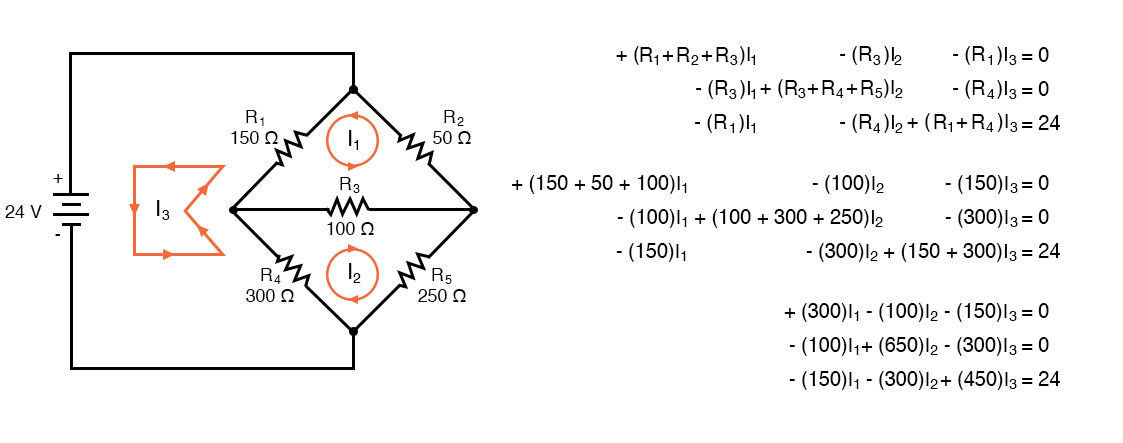
The first step in the Mesh Current method is to draw just enough mesh currents to account for all components in the circuit. Looking at our bridge circuit, it should be obvious where to place two of these currents:
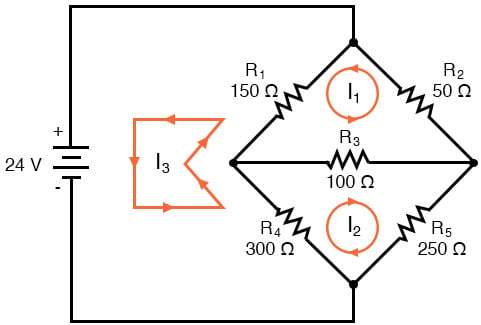
The directions of these mesh currents, of course, is arbitrary. However, two mesh currents are not enough in this circuit, because neither I1 nor I2 goes through the battery. So, we must add a third mesh current, I3:
Here, I have chosen I3 to loop from the bottom side of the battery, through R4, through R1, and back to the top side of the battery. This is not the only path I could have chosen for I3, but it seems the simplest.
Label The Resistor Voltage Drop Polarities
Now, we must label the resistor voltage drop polarities, following each of the assumed currents’ directions:
Notice something very important here: at resistor R4, the polarities for the respective mesh currents do not agree. This is because those mesh currents (I2 and I3) are going through R4 in different directions. This does not preclude the use of the Mesh Current method of analysis, but it does complicate it a bit. Though later, we will show how to avoid the R4 current clash. (See Example below)
Using KVL
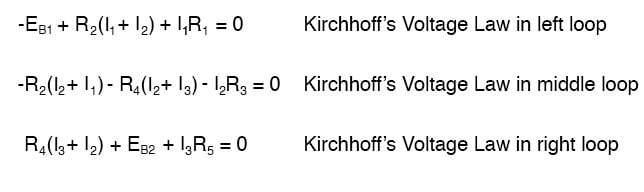
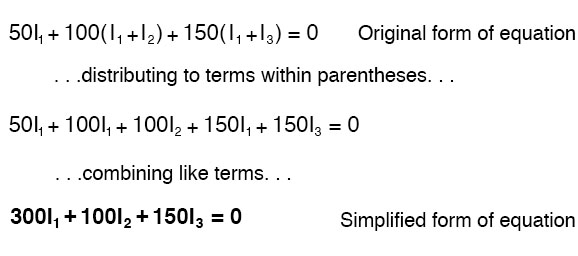
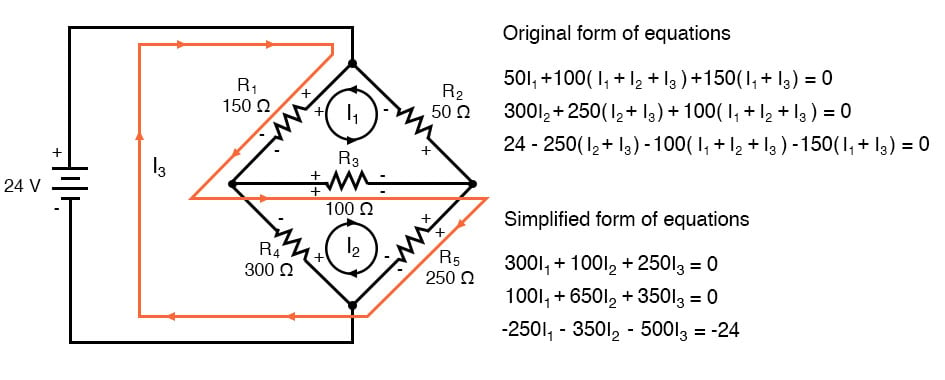
Generating a KVL equation for the top loop of the bridge, starting from the top node and tracing in a clockwise direction:
In this equation, we represent the common directions of currents by their sums through common resistors. For example, resistor R3, with a value of 100 Ω, has its voltage drop represented in the above KVL equation by the expression 100(I1 + I2), since both currents I1 and I2 go through R3 from right to left. The same may be said for resistor R1, with its voltage drop expression shown as 150(I1 + I3), since both I1 and I3 go from bottom to top through that resistor, and thus work together to generate its voltage drop.
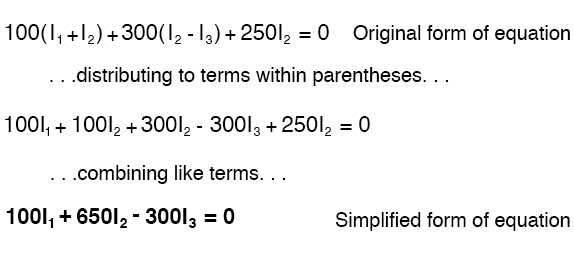
Generating a KVL equation for the bottom loop of the bridge will not be so easy since we have two currents going against each other through resistor R4. Here is how I do it (starting at the right-hand node, and tracing counter-clockwise):
Note how the second term in the equation’s original form has resistor R4‘s value of 300 Ω multiplied by the difference between I2 and I3 (I2 – I3). This is how we represent the combined effect of two mesh currents going in opposite directions through the same component. Choosing the appropriate mathematical signs is very important here: 300(I2 – I3) does not mean the same thing as 300(I3 – I2). I chose to write 300(I2 – I3) because I was thinking first of I2‘s effect (creating a positive voltage drop, measuring with an imaginary voltmeter across R4, red lead on the bottom and black lead on the top), and secondarily of I3‘s effect (creating a negative voltage drop, red lead on the bottom and black lead on the top). If I had thought in terms of I3‘s effect first and I2‘s effect secondarily, holding my imaginary voltmeter leads in the same positions (red on the bottom and black on top), the expression would have been -300(I3 – I2). Note that this expression is mathematically equivalent to the first one: +300(I2 – I3).
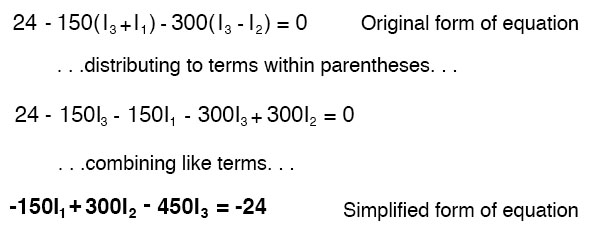
Well, that takes care of two equations, but I still need a third equation to complete my simultaneous equation set of three variables, three equations. This third equation must also include the battery’s voltage, which up to this point does not appear in either two of the previous KVL equations. To generate this equation, I will trace a loop again with my imaginary voltmeter starting from the battery’s bottom (negative) terminal, stepping clockwise (again, the direction in which I step is arbitrary, and does not need to be the same as the direction of the mesh current in that loop):
Solving for the Currents
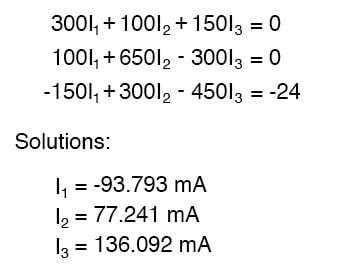
Solving for I1, I2, and I3 using whatever simultaneous equation method we prefer:
Example: Use Octave to find the solution for I1, I2, and I3 from the above-simplified form of equations.
Solution: In Octave, an open-source Matlab® clone, enter the coefficients into the A matrix between square brackets with column elements comma-separated, and rows semicolon-separated. Enter the voltages into the column vector: b. The unknown currents: I1, 2, and I3 are calculated by the command: x=A\b. These are contained within the x column vector.
octave:1>A = [300,100,150;100,650,-300;-150,300,-450]
A =
300 100 150
100 650 -300
-150 300 -450
octave:2> b = [0;0;-24]
b =
0
0
-24
octave:3> x = A\b
x =
-0.093793
0.077241
0.136092
The negative value arrived at for I1 tells us that the assumed direction for that mesh current was incorrect. Thus, the actual current values through each resistor are as such:
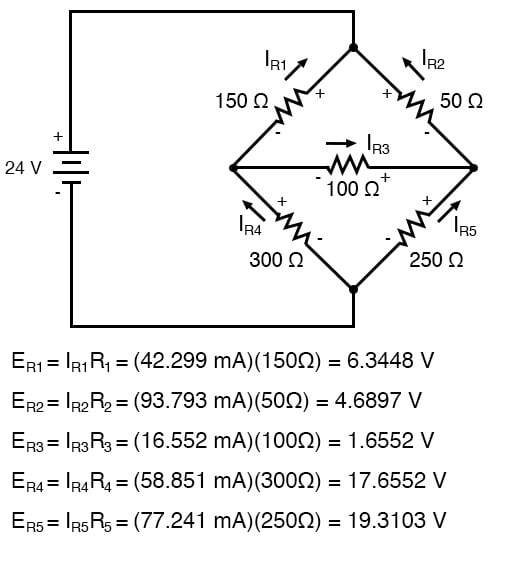
Calculating voltage drops across each resistor:
A SPICE simulation confirms the accuracy of our voltage calculations:
(a) Find a new path for current I3 that does not produce a conflicting polarity on any resistor compared to I1 or I2. R4 was the offending component. (b) Find values for I1, I2, and I3. (c) Find the five resistor currents and compare them to the previous values.
Solution:
(a) Route I3 through R5, R3, and R1 as shown:
Note that the conflicting polarity on R4 has been removed. Moreover, none of the other resistors have conflicting polarities.
(b) Octave, an open source (free) Matlab clone, yields a mesh current vector at “x”:
octave:1> A = [300,100,250;100,650,350;-250,-350,-500]
A =
300 100 250
100 650 350
-250 -350 -500
octave:2> b = [0;0;-24]
b =
0
0
-24
octave:3> x = A\b
x =
-0.093793
-0.058851
0.136092
Not all currents I1, I2, and I3 are the same (I2) as the previous bridge because of different loop paths However, the resistor currents compare to the previous values:
IR1 = I1 + I3 = -93.793 ma + 136.092 ma = 42.299 ma
IR2 = I1 = -93.793 ma
IR3 = I1 + I2 + I3 = -93.793 ma -58.851 ma + 136.092 ma = -16.552 ma
IR4 = I2 = -58.851 ma
IR5 = I2 + I3 = -58.851 ma + 136.092 ma = 77.241 ma
Since the resistor currents are the same as the previous values, the resistor voltages will be identical and need not be calculated again.
REVIEW:
Steps to follow for the “Mesh Current” method of analysis:
(1) Draw mesh currents in loops of the circuit, enough to account for all components.
(2) Label resistor voltage drop polarities based on assumed directions of mesh currents.
(3) Write KVL equations for each loop of the circuit, substituting the product IR for E in each resistor term of the equation. Where two mesh currents intersect through a component, express the current as of the algebraic sum of those two mesh currents (i.e. I1 + I2) if the currents go in the same direction through that component. If not, express the current as of the difference (i.e. I1 – I2).
(4) Solve for unknown mesh currents (simultaneous equations).
(5) If any solution is negative, then the assumed current direction is wrong!
(6) Algebraically add mesh currents to find current components sharing multiple mesh currents.
(7) Solve for voltage drops across all resistors (E=IR).
Mesh current by inspection
We take a second look at the “mesh current method” with all the currents running clockwise (cw). The motivation is to simplify the writing of mesh equations by ignoring the resistor voltage drop polarity. Though, we must pay attention to the polarity of voltage sources with respect to the assumed current direction. The sign of the resistor voltage drops will follow a fixed pattern.
If we write a set of conventional mesh-current equations for the circuit below, where we do pay attention to the signs of the voltage drop across the resistors, we may rearrange the coefficients into a fixed pattern:
Once rearranged, we may write equations by inspection. The signs of the coefficients follow a fixed pattern in the pair above or the set of three in the rules below.
Mesh current rules:
This method assumes conventional current flow voltage sources. Replace any current source in parallel with a resistor with an equivalent voltage source in series with an equivalent resistance.
Ignoring current direction or voltage polarity on resistors, draw counterclockwise current loops traversing all components. Avoid nested loops.
Write voltage-law equations in terms of unknown currents: I1, I2, and I3. Equation 1 coefficient 1, equation 2, coefficient 2, and equation 3 coefficient 3 are the positive sums of resistors around the respective loops.
All other coefficients are negative, representative of the resistance common to a pair of loops. Equation 1 coefficient 2 is the resistor common to loops 1 and 2, coefficient 3 the resistor common to loops 1 an 3. Repeat for other equations and coefficients.
+(sum of R’s loop 1)I1 – (common R loop 1-2)I2 – (common R loop 1-3)I3 = E1 -(common R loop 1-2)I1 + (sum of R’s loop 2)I2 – (common R loop 2-3)I3 = E2 -(common R loop 1-3)I1 – (common R loop 2-3)I2 + (sum of R’s loop 3)I3 = E3
The right-hand side of the equations is equal to an electron current flow voltage source. A voltage rise with respect to the counterclockwise assumed current is positive, and 0 for no voltage source.
Solve equations for mesh currents: I1, I2, and I3. Solve for currents through individual resistors with KCL. Solve for voltages with Ohms Law and KVL.
While the above rules are specific for a three mesh circuit, the rules may be extended to smaller or larger meshes. The figure below illustrates the application of the rules. The three currents are all drawn in the same direction, clockwise. One KVL equation is written for each of the three loops. Note that there is no polarity drawn on the resistors. We do not need it to determine the signs of the coefficients. Though we do need to pay attention to the polarity of the voltage source with respect to the current direction. The I3clockwise current flows out from the (+) positive terminal of the l24V source then returns to the (-) terminal. This is a voltage rise for conventional current flow. Therefore, the third equation right-hand side is -24V.
In Octave, enter the coefficients into the A matrix with column elements comma-separated, and rows semicolon-separated. Enter the voltages into the column vector b. Solve for the unknown currents: I1, I2, and I3 with the command: x=A\b. These currents are contained within the x column vector. The positive values indicate that the three mesh currents all flow in the assumed clockwise direction.
octave:2> A=[300,-100,-150;-100,650,-300;-150,-300,450]
A =
300 -100 -150
-100 650 -300
-150 -300 450
octave:3> b=[0;0;24]
b =
0
0
24
octave:4> x=A\b
x =
0.093793
0.077241
0.136092
The mesh currents match the previous solution by a different mesh current method. The calculation of resistor voltages and currents will be identical to the previous solution. No need to repeat here.
Note that electrical engineering texts are based on conventional current flow. The loop-current, mesh-current method in those texts will run the assumed mesh currents clockwise. The conventional current flows out the (+) terminal of the battery through the circuit, returning to the (-) terminal. A conventional current-voltage rise corresponds to tracing the assumed current from (-) to (+) through any voltage sources.
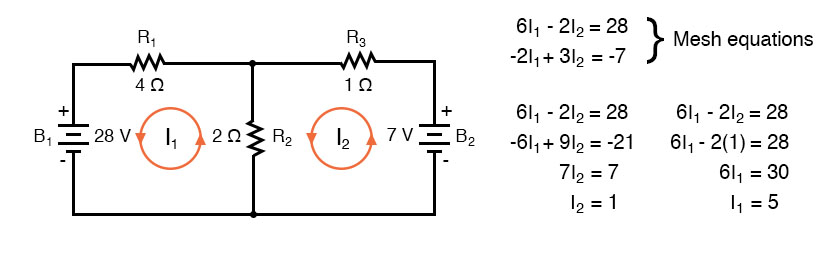
One more example of a previous circuit follows. The resistance around loop 1 is 6 Ω, around loop 2: 3 Ω. The resistance common to both loops is 2 Ω. Note the coefficients of I1 and I2 in the pair of equations. Tracing the assumed clockwise loop 1 current through B1 from (+) to (-) corresponds to an electron current flow voltage rise.
Thus, the sign of the 28 V is positive. The loop 2 counterclockwise assumed current traces (-) to (+) through B2, a voltage drop. Thus, the sign of B2 is negative, -7 in the 2nd mesh equation. Once again, there are no polarity markings on the resistors. Nor do they figure into the equations.
The currents I1 = 5 A, and I2 = 1 A are both positive. They both flow in the direction of the clockwise loops. This compares with previous results.
examples 4.13 and 4.14
Summary:
The modified mesh-current method avoids having to determine the signs of the equation coefficients by drawing all mesh currents clockwise for conventional current flow.
However, we do need to determine the sign of any voltage sources in the loop. The voltage source is positive if the assumed ccw current flows with the battery (source). The sign is negative if the assumed ccw current flows against the battery.
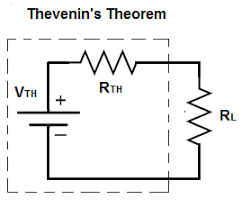
Thevenin’s Theorem states that it is possible to simplify any linear circuit, no matter how complex, to an equivalent circuit with just a single voltage source and series resistance connected to a load. The qualification of “linear” is identical to that found in the Superposition Theorem, where all the underlying equations must be linear (no exponents or roots). If we’re dealing with passive components (such as resistors, and later, inductors and capacitors), this is true. However, there are some components (especially certain gas-discharge and semiconductor components) which are nonlinear: that is, their opposition to current changes with voltage and/or current. As such, we would call circuits containing these types of components, nonlinear circuits.
Thevenin’s Theorem in Power Systems
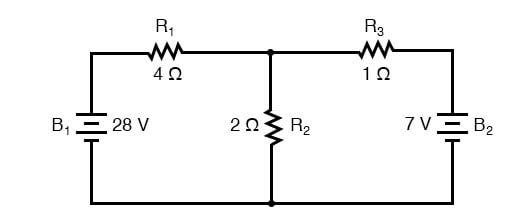
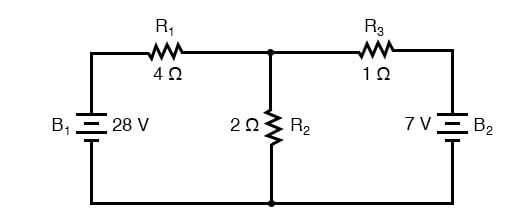
Thevenin’s Theorem is especially useful in analyzing power systems and other circuits where one particular resistor in the circuit (called the “load” resistor) is subject to change, and re-calculation of the circuit is necessary with each trial value of load resistance, to determine the voltage across it and current through it. Let’s take another look at our example circuit:
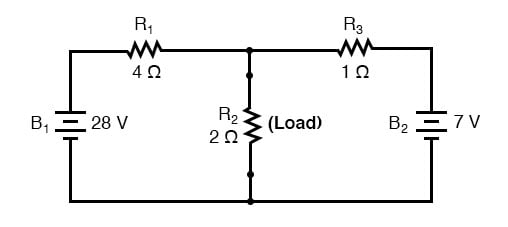
Let’s suppose that we decide to designate R2 as the “load” resistor in this circuit. We already have four methods of analysis at our disposal (Branch Current, Mesh Current, Millman’s Theorem, and Superposition Theorem) to use in determining the voltage across R2 and current through R2, but each of these methods are time-consuming. Imagine repeating any of these methods over and over again to find what would happen if the load resistance changed (changing load resistance is very common in power systems, as multiple loads get switched on and off as needed. the total resistance of their parallel connections changing depending on how many are connected at a time). This could potentially involve a lot of work!
Thevenin Equivalent Circuit
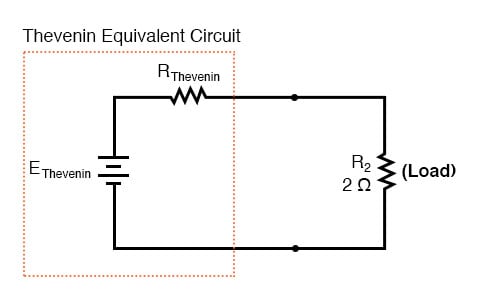
Thevenin’s Theorem makes this easy by temporarily removing the load resistance from the original circuit and reducing what’s left to an equivalent circuit composed of a single voltage source and series resistance. The load resistance can then be re-connected to this “Thevenin equivalent circuit” and calculations carried out as if the whole network were nothing but a simple series circuit:
. . . after Thevenin conversion . . .
The “Thevenin Equivalent Circuit” is the electrical equivalent of B1, R1, R3, and B2 as seen from the two points where our load resistor (R2) connects.
The Thevenin equivalent circuit, if correctly derived, will behave exactly the same as the original circuit formed by B1, R1, R3, and B2. In other words, the load resistor (R2) voltage and current should be exactly the same for the same value of load resistance in the two circuits. The load resistor R2 cannot “tell the difference” between the original network of B1, R1, R3, and B2, and the Thevenin equivalent circuit of EThevenin, and RThevenin, provided that the values for EThevenin and RThevenin have been calculated correctly.
The advantage in performing the “Thevenin conversion” to the simpler circuit, of course, is that it makes load voltage and load current so much easier to solve than in the original network. Calculating the equivalent Thevenin source voltage and series resistance is actually quite easy. First, the chosen load resistor is removed from the original circuit, replaced with a break (open circuit):
Determine Thevenin Voltage
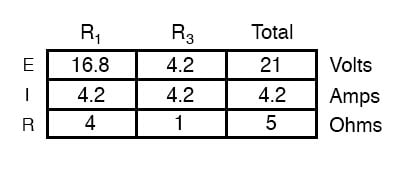
Next, the voltage between the two points where the load resistor used to be attached is determined. Use whatever analysis methods are at your disposal to do this. In this case, the original circuit with the load resistor removed is nothing more than a simple series circuit with opposing batteries, and so we can determine the voltage across the open load terminals by applying the rules of series circuits, Ohm’s Law, and Kirchhoff’s Voltage Law:
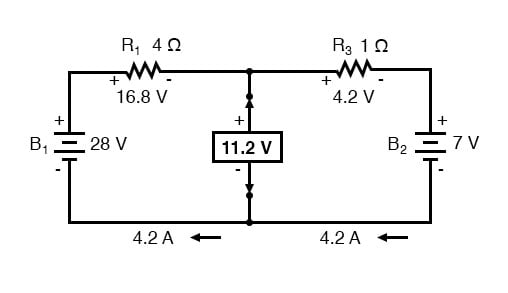
The voltage between the two load connection points can be figured from one of the battery’s voltages and one of the resistor’s voltage drops and comes out to 11.2 volts. This is our “Thevenin voltage” (EThevenin) in the equivalent circuit:
Determine Thevenin Series Resistance
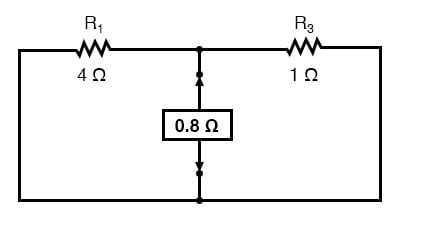
To find the Thevenin series resistance for our equivalent circuit, we need to take the original circuit (with the load resistor still removed), remove the power sources (in the same style as we did with the Superposition Theorem: voltage sources replaced with wires and current sources replaced with breaks), and figure the resistance from one load terminal to the other:
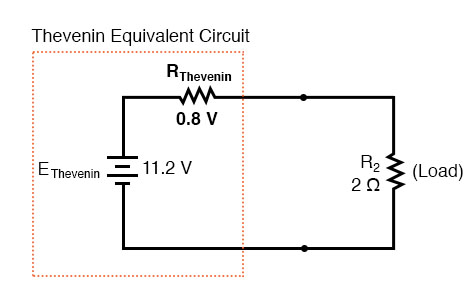
With the removal of the two batteries, the total resistance measured at this location is equal to R1 and R3 in parallel: 0.8 Ω. This is our “Thevenin resistance” (RThevenin) for the equivalent circuit:
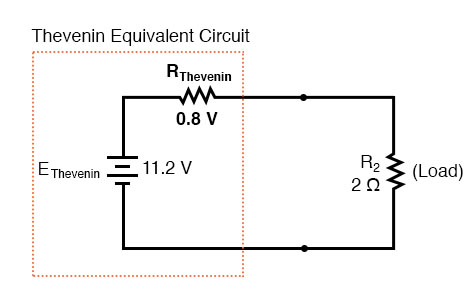
Determine The Voltage Across The Load Resistor
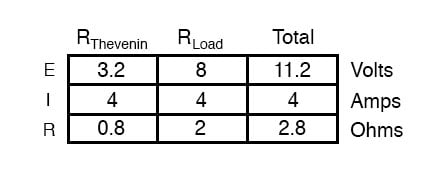
With the load resistor (2 Ω) attached between the connection points, we can determine the voltage across it and current through it as though the whole network were nothing more than a simple series circuit:
Notice that the voltage and current figures for R2 (8 volts, 4 amps) are identical to those found using other methods of analysis. Also notice that the voltage and current figures for the Thevenin series resistance and the Thevenin source (total) do not apply to any component in the original, complex circuit. Thevenin’s Theorem is only useful for determining what happens to a single resistor in a network: the load.
The advantage, of course, is that you can quickly determine what would happen to that single resistor if it were of a value other than 2 Ω without having to go through a lot of analysis again. Just plug in that other value for the load resistor into the Thevenin equivalent circuit and a little bit of series circuit calculation will give you the result.
5.5 example
REVIEW:
Thevenin’s Theorem is a way to reduce a network to an equivalent circuit composed of a single voltage source, series resistance, and series load.
Steps to follow for Thevenin’s Theorem:
Find the Thevenin source voltage by removing the load resistor from the original circuit and calculating the voltage across the open connection points where the load resistor used to be.
Find the Thevenin resistance by removing all power sources in the original circuit (voltage sources shorted and current sources open) and calculating total resistance between the open connection points.
Draw the Thevenin equivalent circuit, with the Thevenin voltage source in series with the Thevenin resistance. The load resistor re-attaches between the two open points of the equivalent circuit.
Analyze voltage and current for the load resistor following the rules for series circuits.
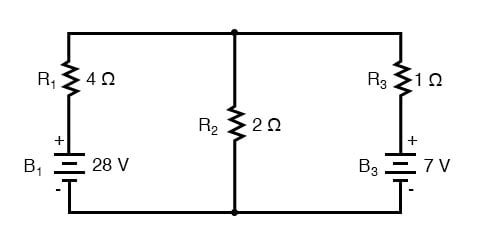
In Millman’s Theorem, the circuit is re-drawn as a parallel network of branches, each branch containing a resistor or series battery/resistor combination. Millman’s Theorem is applicable only to those circuits which can be redrawn accordingly. Here again, is our example circuit used for the last two analysis methods:
And here is that same circuit, re-drawn for the sake of applying Millman’s Theorem:
By considering the supply voltage within each branch and the resistance within each branch, Millman’s Theorem will tell us the voltage across all branches. Please note that I’ve labeled the battery in the rightmost branch as “B3” to clearly denote it as being in the third branch, even though there is no “B2” in the circuit!
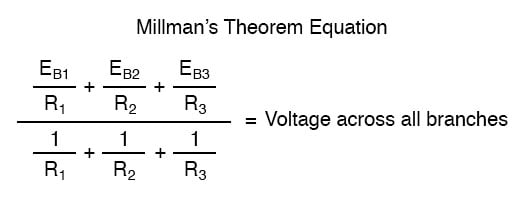
Millman’s Theorem Equation
Millman’s Theorem is nothing more than a long equation, applied to any circuit drawn as a set of parallel-connected branches, each branch with its own voltage source and series resistance:
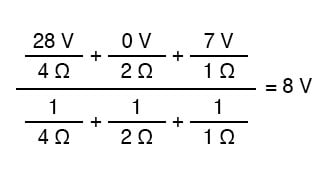
Substituting actual voltage and resistance figures from our example circuit for the variable terms of this equation, we get the following expression:
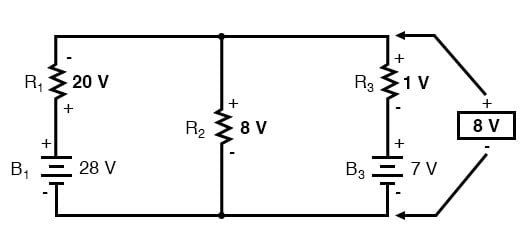
The final answer of 8 volts is the voltage seen across all parallel branches, like this:
The polarity of all voltages in Millman’s Theorem is referenced to the same point. In the example circuit above, I used the bottom wire of the parallel circuit as my reference point, and so the voltages within each branch (28 for the R1 branch, 0 for the R2 branch, and 7 for the R3 branch) were inserted into the equation as positive numbers. Likewise, when the answer came out to 8 volts (positive), this meant that the top wire of the circuit was positive with respect to the bottom wire (the original point of reference). If both batteries had been connected backward (negative end up and positive ends down), the voltage for branch 1 would have been entered into the equation as -28 volts, the voltage for branch 3 as -7 volts, and the resulting answer of -8 volts would have told us that the top wire was negative with respect to the bottom wire (our initial point of reference).
Solving for Resistor Voltage Drops
To solve for resistor voltage drops, the Millman voltage (across the parallel network) must be compared against the voltage source within each branch, using the principle of voltages adding in series to determine the magnitude and polarity of the voltage across each resistor:
Solving for Branch Currents
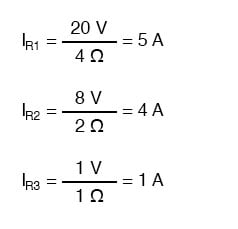
To solve for branch currents, each resistor voltage drop can be divided by its respective resistance (I=E/R):
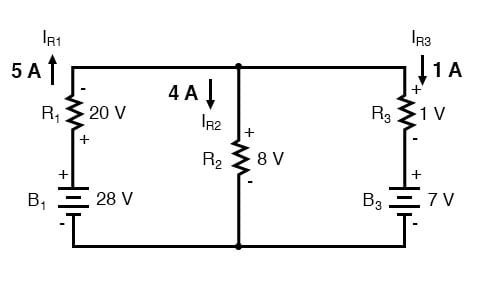
Determining the Direction of Current
The direction of current through each resistor is determined by the polarity across each resistor, not by the polarity across each battery, as the current can be forced back through a battery, as is the case with B3 in the example circuit. This is important to keep in mind since Millman’s Theorem doesn’t provide as direct an indication of “wrong” current direction as does the Branch Current or Mesh Current methods. You must pay close attention to the polarities of resistor voltage drops as given by Kirchhoff’s Voltage Law, determining the direction of currents from that.
Millman’s Theorem is very convenient for determining the voltage across a set of parallel branches, where there are enough voltage sources present to preclude solution via regular series-parallel reduction method. It also is easy in the sense that it doesn’t require the use of simultaneous equations. However, it is limited in that it only applied to circuits which can be re-drawn to fit this form. It cannot be used, for example, to solve an unbalanced bridge circuit. And, even in cases where Millman’s Theorem can be applied, the solution of individual resistor voltage drops can be a bit daunting to some, the Millman’s Theorem equation only providing a single figure for branch voltage.
As you will see, each network analysis method has its own advantages and disadvantages. Each method is a tool, and there is no tool that is perfect for all jobs. The skilled technician, however, carries these methods in his or her mind like a mechanic carries a set of tools in his or her toolbox. The more tools you have equipped yourself with, the better prepared you will be for any eventuality.
Electronic Byte: What are Decoupling Capacitors, in Only 5 Minutes
It’s pretty standard for beginner electronic designers to forget just how unstable input voltages can be, despite how sturdy that power supply might look. And when you’re working with microcontrollers or microprocessors in your digital circuit, the slightest fluctuation in your voltage can lead to undesired results. So what can you do to keep your ICs running with smooth, clean voltage? Use decoupling capacitors! Here’s what they are, and how to use them in today’s Electronic Byte.
What Are Decoupling Capacitors
A decoupling capacitor, also referred to as a bypass capacitor, acts as a kind of energy reservoir. You’ll find these guys commonly placed as close as possible to an integrated circuit (IC) on a PCB layout. Once fully charged, their job is to simply oppose any unexpected change in your input voltages from a power supply. When a decoupling capacitor is in place, it will do one of two things:
If the input voltage drops, then a decoupling capacitor will be able to provide enough power to an IC to keep the voltage stable.
If the voltage increases, then a decoupling capacitor will be able to absorb the excess energy trying to flow through to the IC, which again keeps the voltage stable.
All of this is needed because there’s a ton of electrical noise on a typical circuit board, and the steady 5V that we think we have flowing all over the place is actually jumping around as it moves from component to component.
Some components like integrated circuits rely on their input voltage being as steady as possible, so when you place a decoupling capacitor next to an IC, you’ll be able to protect those sensitive chips by filtering out any excess noise and creating a nice, steady source of power. What happens if you don’t use decoupling capacitors next to your IC? Well, you’ll likely wind up with a processor that starts skipping instructions and behaving abnormally.
Look at an IC on any PCB layout, and you’re bound to find a few capacitors nearby. (Image source)
How to Use Decoupling Capacitors
Check out the schematic below; it shows off a typical application of how you might use decoupling capacitors when placed next to an IC. As you can see, you’ve got a 10uF capacitor sitting the furthest away from the IC, which helps to smooth out any low-frequency changes in an input voltage.
A typical application of using decoupling capacitors next to an IC. (Image source)
And then you have the 0.1uF capacitor placed closest to the IC. This one will help to smooth out any of the high-frequency noise in your circuit. When you combine these two capacitors together, you’ll be delivering a smooth, uninterrupted voltage to your IC to work with. When working with decoupling capacitors in your own design, keep these three things in mind:
Placement. You’ll always want to connect your decoupling capacitors between your power source, whether that’s 5V or 3.3V, and ground.
Distance. You’ll always want to place your decoupling capacitors as close as possible to your IC. The farther away they are, the less effective they’ll be.
Ratings. As a general guideline, we always recommend adding a single 100nF ceramic capacitor and a larger 0.1-10uF electrolytic capacitor for each integrated circuit on your board.
Saving Your Integrated Circuit’s Life
There you go, everything you might need to know about what decoupling capacitors are in only 5 minutes in today’s Electronic Byte. Integrated circuits are a sensitive bunch, and without a smooth power source, you’ll likely be troubleshooting skipped instructions and other strange behaviors. By throwing a set of decoupling capacitors next to one of your ICs, you’ll ensure that they’re always getting a smooth input voltage, regardless of what kind of electrical noise is on your PCB.